





Японский робопёс KLEIYN с гибкой спиной научился лазать по стенам

Большинство современных четвероногих роботов имеют жёсткие туловища цельной конструкции, что помогает им в выполнении отдельных функций. Однако в некоторых сценариях может понадобиться гибкая спина — это подтверждает разработанный в Японии робопёс KLEIYN.

Жёсткая спина обеспечивает четвероногому роботу высокую манёвренность и возможность переносить грузы; гибкая же конструкция может оказаться необходимой, когда требуется протиснуться в узкие пространства — например, забраться по дымоходу. Такое решение предложили инженеры Токийского университета: установленный на спине KLEIYN шарнир помогает ему преодолевать препятствия различной высоты, в том числе те, что могут встретиться на местах стихийных бедствий. Шарнир позволяет спине немного изгибаться, уменьшая длину туловища для перемещения в сложных условиях.
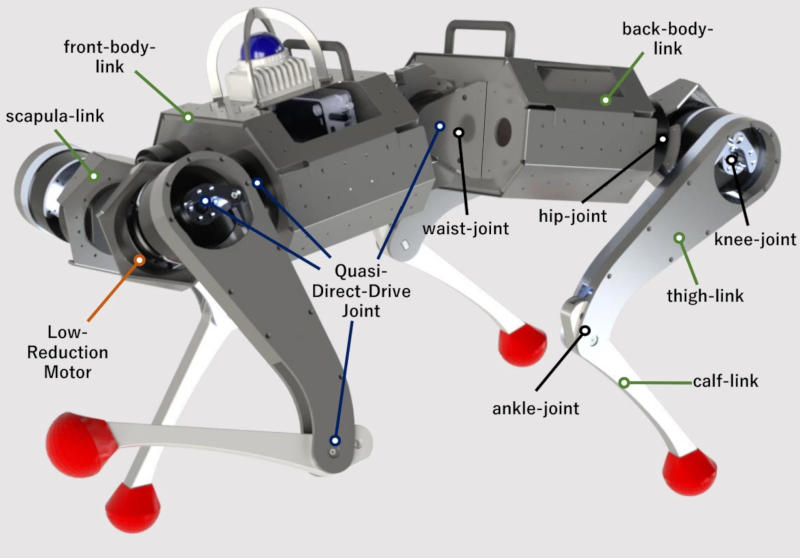
Вместо того чтобы устанавливать на концах конечностей захваты или когти, которые помогли бы машине цепляться за неровные вертикальные поверхности, японские инженеры решили обеспечить достаточное давление на суставы, чтобы робот мог подниматься даже по гладким вертикальным стенам, если они расположены близко друг к другу. Каждая нога имеет три степени свободы, а также шарнир с осью наклона в плечевом и заднем коленном суставах. На всех сочленениях установлены приводы с передаточным отношением 1:10 и крутящим моментом 25 Н·м. «Колени» на передних и задних конечностях KLEIYN направлены в противоположные стороны, чтобы обеспечить наилучший контакт с внешними поверхностями при вертикальном движении.
Поясничный шарнир имеет одну степень свободы и передаточное отношение 1:9 на двигателе с крутящим моментом 40 Н·м. Он соединяет две одинаковые половины туловища в алюминиевом корпусе, внутри которых размещены, в частности, аккумулятор и бортовой компьютер. В передней половине также расположены лидар и встроенный инерциальный измерительный блок. Управление KLEIYN осуществляет платформа с искусственным интеллектом Contact-Guided Curriculum Learning, которая обучалась с подкреплением в виртуальных средах. После обучения робот в реальном мире смог подняться по двум вертикальным стенам, находящимся на расстоянии 800 мм друг от друга, со скоростью до 170 мм/с — это в 50 раз быстрее, чем у одного из аналогичных роботов, созданных в США. Масса KLEIYN составляет 13 кг, при высоте 400 мм и длине выпрямленного туловища 760 мм. На практике робот может быть полезен для промышленных инспекций и в поисково-спасательных операциях.